
To automatically detect and remove likely noise points from loaded or selected Lidar data, select the Auto-Classify Noise Points button on the Lidar Toolbar
When the classification has finished a pop-up will show the number of points classified as low noise and high noise.
![]() This tool requires Global Mapper Pro.
This tool requires Global Mapper Pro.
When the classification has finished a pop-up will show the number of points classified as low noise and high noise.
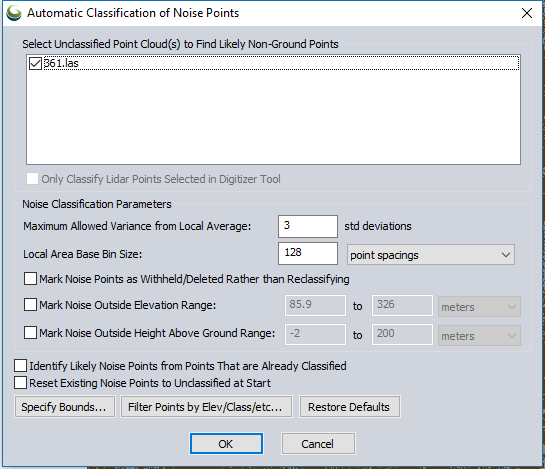
Select Unclassified Point Cloud(s) to Find Likely Noise Points In
If more than one Lidar data set is loaded into workspace, specific Lidar layers may be selected, or unselected, for classification.
Check the option to Only Classify Lidar Points Selected
in Digitizer Tool to run noise classification tool only on points selected
by the Digitizer.
Noise Classification Parameters
Maximum Allowed Variance from Local Average
Specify the maximum allowed variance from the local average of height values for the loaded or selected points in standard deviations. Points more than the specified number of standard deviations away from a local average height will be identified as noise. The default value is 3 standard deviations.
Local Area Base Bin Size
Specify the sample spacing at which to detect noise. The specified local area is used in a 5x5 neighborhood to determine outliers of the specified standard deviation. In most cases this bin size should be a larger value than some of the other bin size settings, in order to correctly account for expected variance in the data. The default value is 128 sample spacings. So with the default values, if the cloud resolution is about 0.1 meters per pixel, the local group would be a 5x5 set of sample cells 12.8 meters on each side.
Additional Options
Mark Noise Points as Withheld/ Deleted Rather than Reclassifying - Mark the selected or loaded points to be withheld, rather than classifying as noise.
Mark Noise Outside Elevation Range - Manually define an elevation range, outside of which points will be defined as noise. The default values will be the minimum and maximum elevations for the loaded data.
Mark Noise Outside Height Above Ground Range - Manually define a height above ground range, outside of which points will be defined as noise. It is recommended to use this setting only if the point cloud had existing ground classifications. If there is no ground classification, the height above ground values will be very approximate, and may be inaccurate.
Identify Likely Noise Points from Points that are Already Classified - This will also consider points that have existing classifications as possible noise points.
Reset Existing Noise Point to Unclassified at Start - Resets existing noise points to unclassified.
Filters
Specify Bounds... - Specify the bounds of the classification operation by drawing a box or using coordinates.
Filter Points by Elev/Class/etc... - Use the Filter Lidar by Class options to define the operation.
Restore Defaults
Press the Restore Defaults button to reset the numeric parameters on the dialog to default values.