
The automated classification of building, pole, and vegetation points can provide valuable intelligence to a point cloud. The Segmentation Method is an updated algorithm (beginning with Global Mapper v22) that supersedes the Auto-Classify Buildings and Vegetation Points: Gridded Method tool provided in the Gridded Method tab, to provide better support for all types of point clouds, from aerial, UAV, terrestrial, photo-generated and other sources.
The classification of non-ground points involves a statistical analysis (principal components analysis) of clusters of nearby points to determine what is likely part of a building feature, tree or pole feature. The algorithm involves a clustering step and an identification step. Points are gathered into clusters based on a measure of similarity between nearby points, with the intent to group points that belong to the same object or feature. Building points are identified based on various statistics about the cluster to which they belong, including covariance, orientation and curvature of the local neighborhood. If the Classify Pole option is selected, poles will be identified simultaneous to buildings. If the Classify Trees option is selected, the same process is repeated with the building points, and pole points if enabled, removed with the intent to identify clusters of points belonging to trees.
The provided options support the filtering of ground clutter, customization of the similarity measure evaluated and customization of the thresholds applied in the clustering process.
To access this tool press the  Auto-Classify Non-Ground Lidar Points from the Lidar Automatic Classification toolbar. Keep the Segmentation Method tab as the active tab.
Auto-Classify Non-Ground Lidar Points from the Lidar Automatic Classification toolbar. Keep the Segmentation Method tab as the active tab.
![]() This tool requires Global Mapper Pro.
This tool requires Global Mapper Pro.
Note: Prior to using the non-ground classification tool, the point cloud should have ground classified. If the ground is not classified, or the existing ground classification appears sparse, rerun the Lidar Automatic Ground Classification tool. It is also recommended to run the Lidar Automatic Noise Classification tool if the dataset is noisy, and to sort the point cloud either on load in the Lidar and 3D Point Cloud Load Options or after loaded.
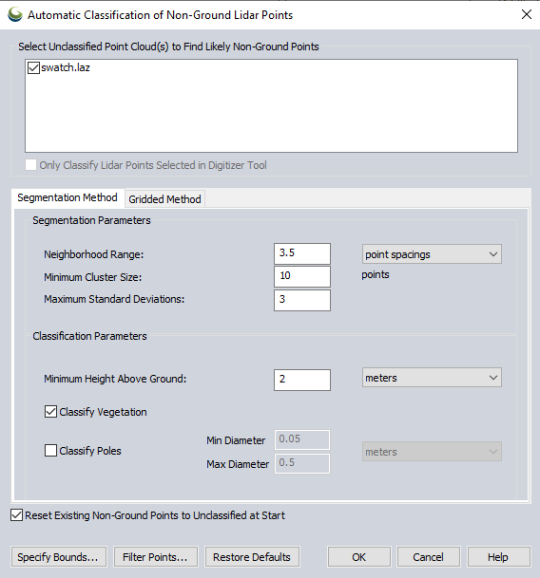
Select Unclassified Point Cloud(s) to find Likely Non-Ground Points
Use the check-boxes in this section if more than one Lidar data set is loaded into workspace, specific Lidar layers may be selected (check in box), or unselected (box empty), for automated classification.
Check the option to 'Only Classify Lidar Points Selected in Digitizer Tool' to run classification tool only on points selected by the Digitizer tool.
Classification Settings
Method
Choose Segmentation Method tab to use the settings described below. The Segmentation Method segments the point cloud into clusters of points, and then determines if those clusters are likely building or vegetation points. Similar parameters, with more detailed options, appear in the stand alone Segmentation tool.
The Gridded Method classifies points based on their geometric relationship to a best fit plane. This method best for aerial lidar with multiple returns in forested areas. For more information on the gridded method, see Auto-Classify Buildings and Vegetation Points: Gridded Method.
Segmentation Parameters
Once neighborhoods are established and quantified using principal component analysis, a measure of point-to-point similarity is evaluated to guide clustering. This similarity measure is evaluated as a generalized statistical distance between points, based on the distributions defined by the statistics collected over their local neighborhoods. Clustering aims to group points with similar surface characteristics into groups that can be classified based on those characteristics.
Neighborhood Range
The principal component analysis, part of the segmentation process, is used to evaluate characteristics of the surface to which a point belongs. That analysis includes other points in a local neighborhood and evaluates average properties that quantify the surface at a point.
Neighborhood Range defines the region around a point that will be evaluated to determine local surface properties; it should roughly be on the same scale as the features being evaluated. For example, when trying to characterize building roof planes, this value should be large enough that the included points clearly define a surface plane. Point density influences the choice of this parameter; a good value will define neighborhoods with enough points to define reliable statistics. Using the point spacings option for this parameter is a good way to guarantee that neighborhoods include a sufficient number of points.
Changing the neighborhood range will have the largest impact on the classification results.
With a lower density point cloud, such as moderate resolution aerial lidar, the neighborhood range should be similar to the size of the major parts of the building, such as a plane of a roof, often around 3-4 point spacings.
With a high density point cloud, such as terrestrial lidar in which it is possible to visually detect parts of buildings (like windows, smaller roof planes or chimneys), the neighborhood range should be roughly at the scale of those smaller components--sometimes as small as 0.2 - 0.4 meters.
Minimum Cluster Size
The minimum cluster size places a threshold on the number of points required for a cluster to be classified. Small groups are not likely to have sufficient statistics to support reliable classification. Smaller values for this parameter will result in higher probability of detection as well as false alarm. Larger values for this parameter reduce the probability of false alarm at the cost of reduction in detection probability.
Maximum Standard Deviations
Point-to-point associations are limited to those that are within a specified statistical distance using the similarity measure. This Standard Deviation threshold reduces processing requirements, and maintains the purity of clusters in the sense that it inhibits associations with points that have different surface characteristics. Keep in mind that compared to other standard deviation values used in the application, this a multidimensional graph comparing various statistics, so the value is typically higher than in a 2D graph.
A good value for this is generally around 3-4 with larger values required for data that is noisy, striped or has other measurement related problems. If this parameter is too small, then little or no clustering will happen and there will be a low probability of detection. If this parameter is too large, then clustering may be overly permissive and there will be a high probability of false alarm.
Classification Parameters
Minimum Height Above Ground - In order to reduce ground clutter, only points that are a minimum height above the identified ground surface are passed along for non-ground classification. A significant fraction of incorrectly classified points are related to ground points that were not identified in the ground classification step or points in the clutter region just above the ground surface.
With aerial lidar, where only the roof plane is visible, this value makes sense around 2 meters.
With higher density lidar, such as terrestrial and photo-generated point clouds where the sides of buildings are included, it may be desirable to set this to just above the low vegetation or other near ground noise that may appear connected or planar once the ground is removed.
Classify Vegetation
Check this box to classify high vegetation such as trees. This process will remove the building points, and pole points if enabled, then rerun the segmentation process with the intent to identify clusters of points belonging to trees.
Classify Poles
Check this box to classify power poles. This identifies cylindrical patterns in the point cloud, similar to how planes are identified in buildings. Diameter is assumed to be constant over the pole and isn't measured at a certain height above ground.
Min Diameter - Cylindrical features with a diameter smaller than this setting will not be classified as poles.
Max Diameter - Cylindrical features with a diameter larger than this setting will not be classified as poles.
Reset Existing Non-Ground Points to Unclassified at Start
Resets the Unclassified Non-Ground Point data, resetting any points classified as non-ground. Removes all manual and automatic classification of ground points in selected point data, setting all points to unclassified.
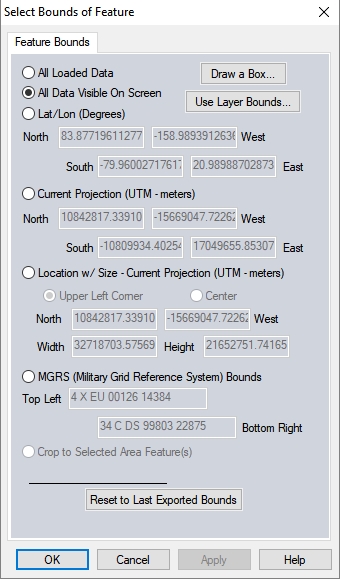
Specify Bounds
Use Specify Bounds... to set the bounds for the classification by drawing a box on the workspace, by using coordinate extents, or by cropping to a selected area feature.
{kind=link}
When classifying a large dataset, it is recommended to test the classification on a sample area. Run the classifications multiple times on the sample area, adjusting to values, to obtain a good classification result prior to processing the entire data extent.
Filter Points
Filter Points...Contains additional
settings for filtering points for classification by elevation and color
values, Source ID, and existing classification. The user may also exclude
all points outside of a specified scan angle.