Automatic Pole Classification
Pole Classification is part of the Classification tool found within the  Automatic Point Cloud Analysis tool.
Automatic Point Cloud Analysis tool.
![]() This tool requires Global Mapper Pro.
This tool requires Global Mapper Pro.
The Pole Classification option in the Automatic Point Cloud Analysis tool can automatically detect poles or pole like objects in point cloud data. This works best in data that was not collected from a nadir or top down perspective where the full pole is visible in the data. It recommended to run this data on point clouds with at least 20 points /m2.
Pole Classification will find and classify points that are poles or pole like objects, this includes similar objects such as signs, lamp-posts, etc. If you would like to classify telephone poles, it is recommended to first classify Powerlines (or also check the powerline option) to rule out wires that may be connected to the pole like objects.
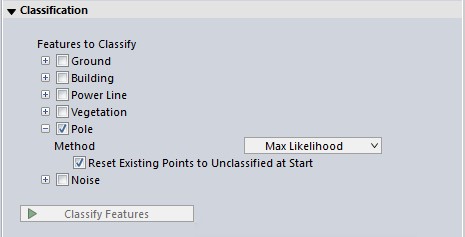
There are 2 algorithms for pole classification: Max Likelihood and Smoothing SVM. Choose one of these options from the drop down window:
-
Max Likelihood uses segmentation and is developed to work with more modern point clouds such as terrestrial lidar, programmatic and drone-mounted..
-
Smoothing SVM - similar to Max Likelihood, with the added ability to smooth the point cloud first.
You can choose to run multiple classifications at once by checking multiple options (noise, ground, etc). They will run in a pre-specified order based on method.
Once your settings have been determined for all desired classifications, click Classify Features to begin processing.
Shared Settings
The two Pole classification algorithms share multiple settings with the Feature Extraction tool:
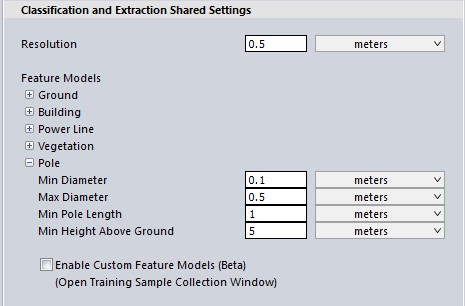
Min and Max Diameter
Cylindrical features with a diameter between these two settings will be classified as poles. Poles that are larger or smaller will be ignored. This is useful for omitting trees.
Diameter is assumed to be constant over the pole and isn't measured at a certain height above ground.
Minimum Pole Length
Specify the minimum height of the desired pole objects. This will factor out point clusters that do not contain a tall enough pole object.
Minimum Height Above Ground
In order to reduce ground clutter, only points that are a minimum height above the identified ground surface are passed along for non-ground classification such as poles. A significant fraction of incorrectly classified points are related to ground points that were not identified in the ground classification step or points in the clutter region just above the ground surface.
Pole Classification Settings
The Max Likelihood Method
This method uses segmentation to identify and classify clusters of points in a cylindrical feature of a certain height/width which touches the ground, based on user settings. When classifying poles, be sure your resolution is large enough to see the curve in a pole features. For example, if you are only looking at a 0.1 meter patch, a telephone pole will appear flat.
-
The settings in the Geometric Segmentation tool can be used in Max Likelihood classifications. Simply open the Geometric Segmentation tool, choose your settings, and check the box to Use Custom Segmentation Parameters. These settings will influence how the point cloud is segmented.
-
To train the algorithm for your specific feature, check the box to enable Custom Feature Models. These settings will influence how the point cloud is classified.
The Smoothing SVM Method (Support Vector Machine)
The SVM method works best with clean point clouds. The smoothing options help to exclude any noise points (vegetation, wires, etc.) that may be near the pole features.
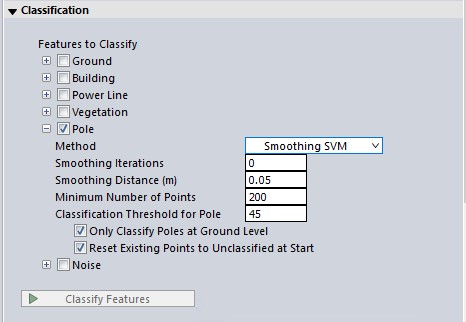
Smoothing Iterations
Within the context of the classification algorithm, the point cloud can be smoothed so that the points more neatly align. This can improve the classification of poles. More smoothing iterations will increase the processing time.
Smoothing Distance
This value will automatically adjust based on the loaded data, and is recommended to be between 10 and 20 points spacings. The auto-suggested value is 10 point spacings. The neighborhood distance value is used for smoothing as well as segmentation and classification. It defines how far to search near a point for other nearby points (up to the nearest 15 points). Increase this value if no poles or not enough poles are detected in the point cloud. Increasing this value will also increase the processing time.
Minimum Points Per Pole
Specify the minimum number of points that must be contained in the object to be considered a pole.
Classification Threshold for Pole
This classification threshold determines how pole like an object is. Simple posts would typically be closer to ~ 90 - 100% pole like, where as street signs that have planar aspects and less compact geometry would typically be ~ 50 - 75% pole like. As the threshold drops down into the ~ 30 - 40% range trees would also start to be identified.
Only Classify Poles at Ground Level
Poles that do not make contact with the ground will not be classified.
Reset Existing Points to Unclassified at Start
Resets the classified pole point data to unclassified at the beginning of processing.