Automatic Building Classification
Automatic Building Classification is part of the Classification tool within the  Automatic Point Cloud Analysis tool.
Automatic Point Cloud Analysis tool.
|
|
This tool requires Global Mapper Pro |
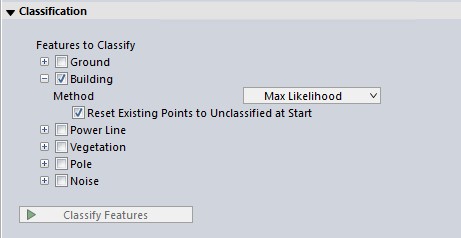
The automated classification of building points can provide valuable intelligence to a point cloud. There are two methods for classifying buildings : Max Likelihood and Grid. Choose one of these options from the drop down window:
-
The Max Likelihood method provides better support for all types of point clouds, from aerial, UAV, terrestrial, photo-generated and other sources. This is generally the best choice.
-
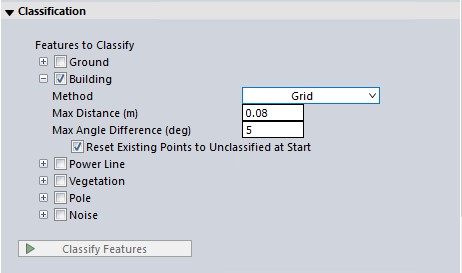
The Grid Method classifies points based on their geometric relationship to a best fit plane. This method is best for aerial lidar with multiple returns in forested areas.
You can choose to run multiple classifications at once by checking multiple options (noise, ground, etc). They will run in a pre-specified order based on method.
Once your settings have been determined for all desired classifications, click Classify Features to begin processing.
Note: Prior to using the building classification tool, the point cloud should have ground classified. If the ground is not classified, or the existing ground classification appears sparse, check the box to run ground classification as well. The Automatic Point Cloud Analysis tool will classify ground (and noise if selected) before buildings.
Shared Settings:
The two building classification algorithms share multiple settings with the Feature Extraction tool:
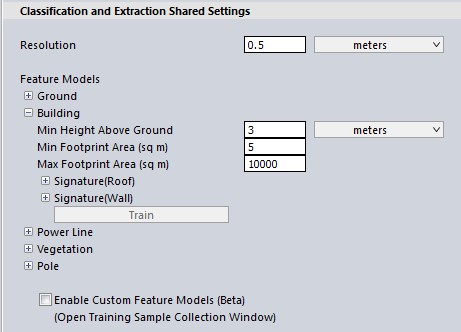
Resolution
Neighborhood Range defines the region around a point that will be evaluated to determine local surface properties; it should roughly be on the same scale as the features being evaluated. For example, when trying to characterize building roof planes, this value should be large enough that the included points clearly define a surface plane. Point density influences the choice of this parameter; a good value will define neighborhoods with enough points to define reliable statistics. Using the point spacings option for this parameter is a good way to guarantee that neighborhoods include a sufficient number of points.
Changing the neighborhood range will have the largest impact on the classification results.
With a lower density point cloud (such as moderate resolution aerial lidar), the neighborhood range should be similar to the size of the major parts of the building, such as a plane of a roof, often around 3-4 point spacings.
With a high density point cloud (such as terrestrial lidar), in which it is possible to visually detect parts of buildings (like windows, smaller roof planes or chimneys), the neighborhood range should be roughly at the scale of those smaller components--sometimes as small as 0.2 - 0.4 meters.
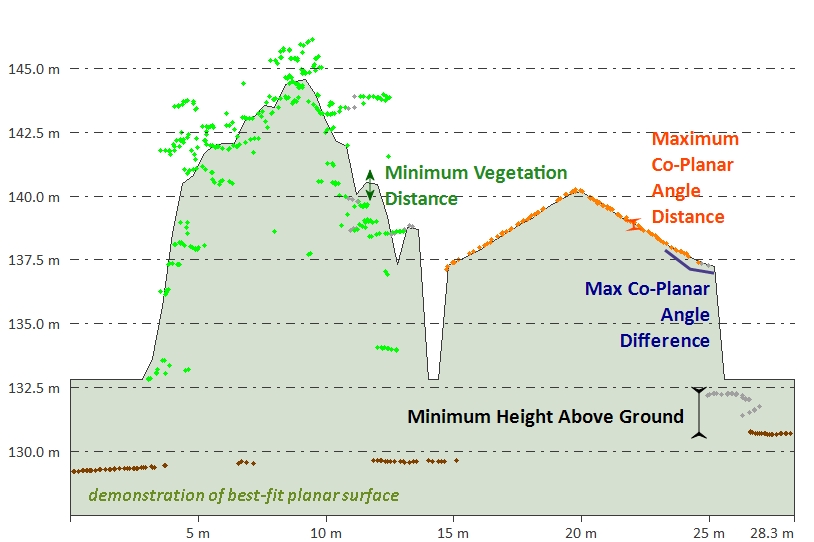
Minimum Height Above Ground
In order to reduce ground clutter, only points that are a minimum height above the identified ground surface are passed along for non-ground classification. A significant fraction of incorrectly classified points are caused by ground points that were not identified in the ground classification step or points in the clutter region just above the ground surface.
With aerial lidar, where only the roof plane is visible, a suggested minimum height above ground is 2 meters.
With higher density lidar, such as terrestrial and photo-generated point clouds where the sides of buildings are included, it may be desirable to set this to just above the low vegetation or nearby ground noise which could appear planar after the ground is removed.
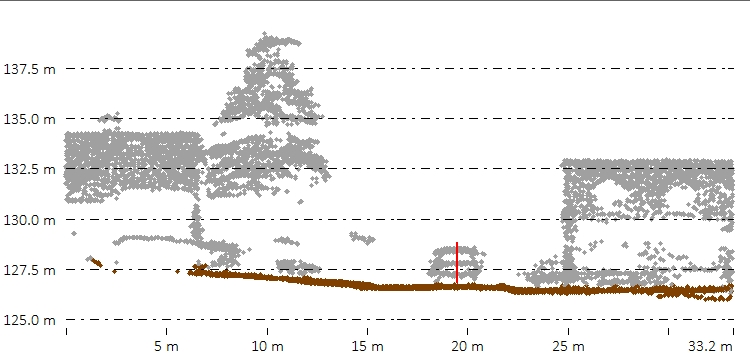
The default value is 2 meters. Typically, buildings and high vegetation points are at least 2 to 2.5 meters above the ground, as in the example below. This value can help eliminate other objects, such as cars, from the classification. The red line in the above path profile views illustrates the 2 meter height above ground, in comparison to a car. All points below the height above ground value will be removed from consideration as buildings or trees.
Minimum and Maximum Footprint Area (sq m)
Smaller values for this parameter will result in higher probability of detection as well as false alarm. Larger values for this parameter reduce the probability of false alarm at the cost of reduction in detection probability.
Building Classification Settings
The Max Likelihood method
The Max Likelihood method segments the point cloud into clusters of points, and then determines if those clusters are likely building points. The algorithm involves a clustering step and an identification step. Points are gathered into clusters based on a measure of similarity between nearby points, with the intent to group points that belong to the same object or feature. Building points are identified based on various statistics about the cluster to which they belong, including covariance, orientation and curvature of the local neighborhood. Clustering aims to group points with similar surface characteristics into groups that can be classified based on those characteristics.
-
The settings in the Geometric Segmentation tool can be used in Max Likelihood classifications. Simply open the Geometric Segmentation tool, choose your settings, and check the box to Use Custom Segmentation Parameters. These settings will influence how the point cloud is segmented.
-
To train the algorithm for your specific feature, check the box to enable Custom Feature Models. These settings will influence how the point cloud is classified.
The Grid Method
The Grid Method is designed for use with aerial lidar, and has been superseded by the Max Likelihood method. The algorithm works by classifying points as "building" based on their relationship to a calculated best-fit planar surface inside each segment (determined by the resolution) of point data. Points that are close to the calculated plane are classified as building.
Minimum Height Above Ground
Use this setting to specify the minimum height above ground that a point has to be in order to consider it as a possible building or high vegetation point.
The default value is 2 meters. Typically, buildings and high vegetation points are at least 2 to 2.5 meters above the ground, as in the example below. This value can help eliminate other objects, such as cars, from the classification.
The red line in the above path profile views illustrates the 2 meter height above ground, in comparison to a car. All points below the height above ground value will be removed from consideration as buildings or trees.
Maximum Distance (Co-Planar)
Use
this field to set the maximum co-planar distance in meters to use for classifying
non-ground points. This specifies the maximum RMSE (root mean square error) from a best-fit local plane that the points in a small region all have to be within, in order to consider the region a building. It is a tolerance or error value relative to a planar surface that would represent a building.
Max Angle Difference
Use this field to set the maximum angle difference (in degrees) to be used when auto-classifying non-ground points. Specifically, this will determine the maximum angle (in degrees) between adjacent best-fit planes, such that they can still be considered part of the same plane when identifying flat building surfaces.
Additional Options
Enable Report
Enable this option to see a report of the classification results and to save the classification settings as a .json file for future use or to share with other users. The Enable Report option generates a report that summarizes the settings used and the results of a classification method. The report is generated as a text file in a Reports folder at the specified location.
To load the saved settings .json file: Open the automated Point Cloud Analysis tool, check the box to Enable Custom Feature Models, then from the list of options that appear, choose Load Models.
Reset Existing Non-Ground Points to Unclassified at Start
Resets the Unclassified Non-Ground Point data, resetting any points classified as non-ground. Removes all manual and automatic classification of ground points in selected point data, setting all points to unclassified.