 Fit Point Clouds
Fit Point Clouds
The Fit Point Clouds tool automatically aligns one point cloud with another, minimizing the X, Y and Z difference between the point clouds. This tool can use 3D control points to manually align a point cloud, or it can calculate an automatic transformation to align the point cloud using the Iterative Closest Point (ICP) method. The point clouds should have some overlap in order for the auto-alignment to perform best.
Select the Lidar - Fit Point Clouds button from the Lidar Toolbar to access this tool. The manual alignment option can also be accessed by right-clicking on the point cloud layer in the Control Center and choosing RECTIFY to bring up the 3D Rectification dialog directly.
![]() This tool requires Global Mapper Pro.
This tool requires Global Mapper Pro.
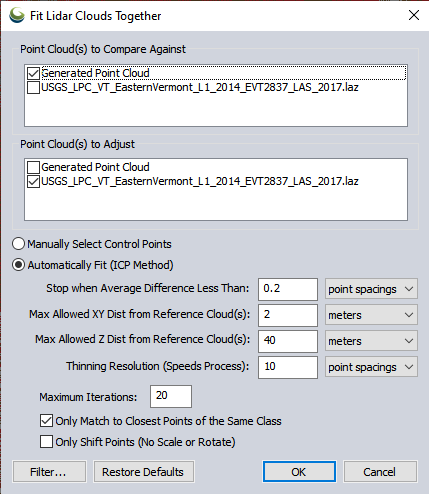
Point Cloud(s) to Compare Against
Select the reference point cloud or point clouds that the output should align to. Any reference clouds selected should already be aligned with each other.
Point Cloud(s) to Adjust
Select the point cloud or point clouds that will be adjusted. The selected point clouds will be adjust as one large set of points, so while they will not match the reference cloud(s), they should agree with each other. Otherwise it is necessary to align them each separately, running the Fit Point Clouds tool more than once.
Manually Select Control Points
Chose this option to perform a 3D rectification using a set of 3D control points.
For more information see 3D Rectification.
Automatic Fit (ICP Method)
The Iterative Closest Point Method will perform multiple iterations where the closest point in the reference cloud is found to each original original cloud point. Then a best-fit transform is found. This calculates a 3D affine transformation, finding a 4X4 matrix that best-fits the data. The transform is then applied to the points and the process repeated, resulting in a best-fit transform that is as close as the ICP process gets based on the number of allowed iterations and stop distance.
The following options control this:
Stop when Average Distance Less Than
This specifies that the iteration should stop when the average distance between the cloud(s) to adjust and the reference cloud(s) are less than some distance (given in point spacings or meters). The process will stop automatically when the average distance between points gets under this threshold, or the 'Maximum Iterations' is hit, or if the average distance stops improving between runs. If the process finishes from any of those criteria and the average distance is less than or equal to this threshold, the adjustment is performed without confirmation. If the process stops before this threshold is hit, the user is prompted to confirm they want to apply whatever transform was found.
Max Allowed XY Dist from Reference Cloud(s)
This option specifies the maximum allowed horizontal distance between points. Any points that are further than this distance horizontal distance from the reference cloud are completely ignored.
Max Allowed Z Dist from Reference Cloud(s)
Specify the maximum allowed vertical distance between points. Any points that are further than this difference in height from the reference cloud are completely ignored. So if you have some clouds that are far apart (typically due to Z values being way off), make sure this value is large enough to account for that.
Thinning Resolution
To more quickly calculate a best-fit transformation, specify a thinning resolution for the cloud being adjusted. The thinned cloud is used only internally when comparing to the reference cloud(s) to calculate the transformation, but the full point cloud will be adjusted regardless of this setting. This uses the 3D thinning method, as described in Spatially Thin Lidar Layers. Bigger values do more thinning and make the process faster. Smaller values will check more points and theoretically give a better result. But the thinned adjustment should be very near the calculation for the full point cloud unless a very high thinning value is used.
Maximum Iterations
Maximum number of iterations to do when checking for a better match. Typically the process finishes before 5 iterations, so the default max of 20 is usually not reached.
Only Match to Closest Points of the Same Class
When finding the nearest point in the from and reference clouds, only look for points with the same classification. This setting can improve the calculated transformation if the point clouds are well classified and in agreement.
Only Shift Points (No Scale or Rotate)
Only allow a simple shift of the data in the X, Y, and Z directions, with no scaling or rotation. This will also be faster as it always uses the results after the first iteration when it starts with just a translate.
Filter
By default the tool will calculate a transform using only Last and Unknown returns. It will also excludes Low and High Noise points. Use the filter option to further restrict which points are used in the reference cloud and the cloud being adjusted when calculating the best-fit transform. For example if the point clouds are well classified, it might be desirable to calculate the adjustment using only ground points.
If the transformation is applied, it will be applied to all points in the adjusted layer, regardless of filter settings. For more information on filter options see Filter Selected Lidar Points.